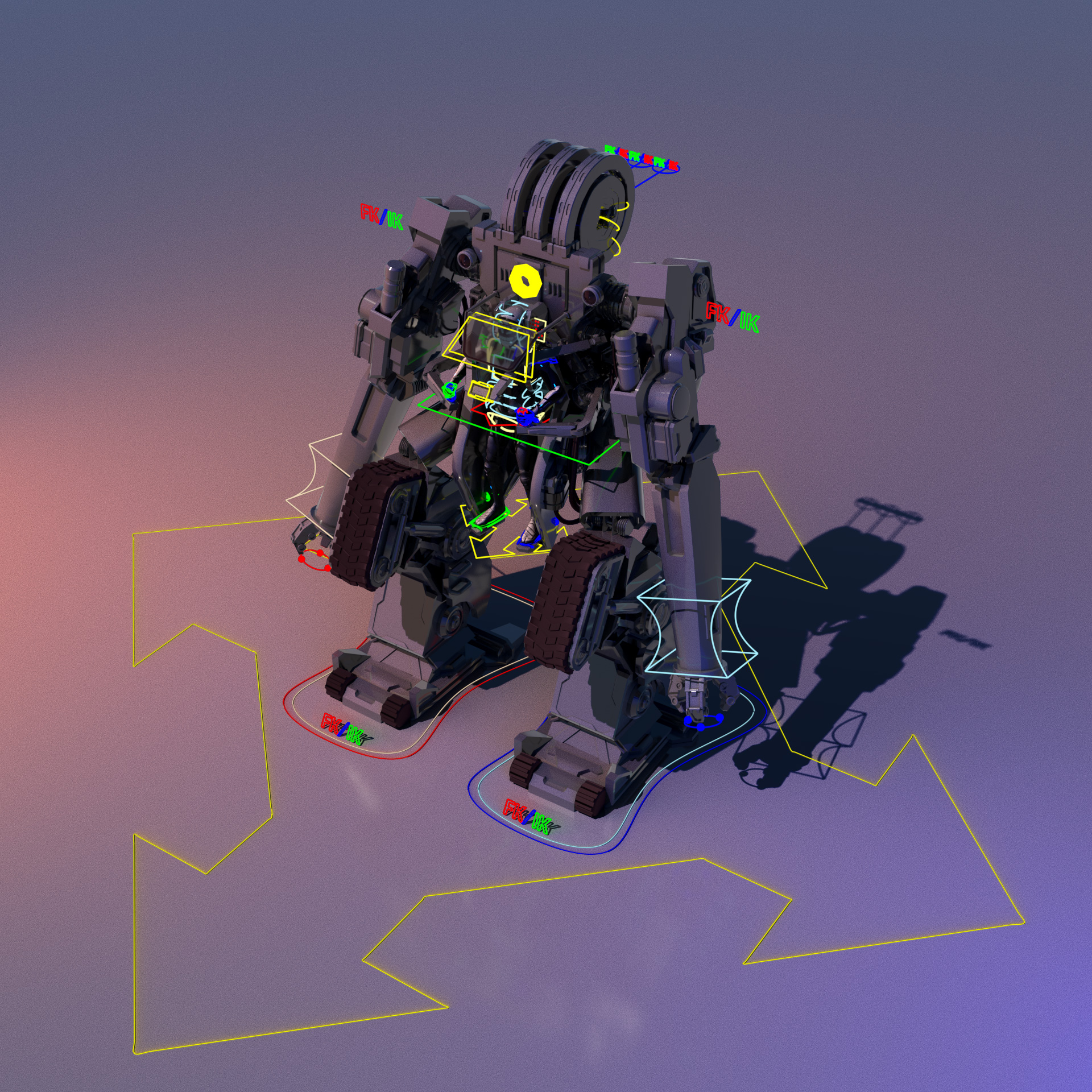
EVA Suit Rig
This Masterclass project was completed as apart of my University Degree at the NCCA in my final year. The brief was to rig this EVA model from Fronteir Developments and have it be controlled optionally by the Pilot. The EVA model has a combination of mechanical moving parts as well as flexible tentacles that unravel from the top of the model.
The tentacles use a Variable FK setup that was designed by Jeff Brodsky for his Trunk Rig. I implemented this method and wrote a script that would automate the entire setup to a set number of joints. This allowed for the fluid movement of the tentacles and having smooth unfurling and furling of the joints. The tentacles also implement a Multi Chain IK solver for using a single point at the end of the tentacle to drive the motion smoothly and easily.
The system also implements FK to IK matching through scripts that are run from the FK/IK controls (no need for shelves or seperate button layouts). There are controls to sit the pilot in place on the EVA as mell as matching the arms to the correct location.